

角ニ連の前のモデルです。
角二連よりシンプルです。
スイッチの種類が二つあります。
LEDライトがプルーになり、三台を連結して一つのアダプターで運転できるようになりました。
ただし、丸二連よりホルダーの品質が悪くなったので、
ホルダーが割れて回転ドラムと擦れる不具合が生じるようになりました。
裏蓋を開けて白い粉が出ていればこの不具合です。
モーターは代替品があり交換できますが、ホルダーに代替品はありません。
時計・自動巻き 資料
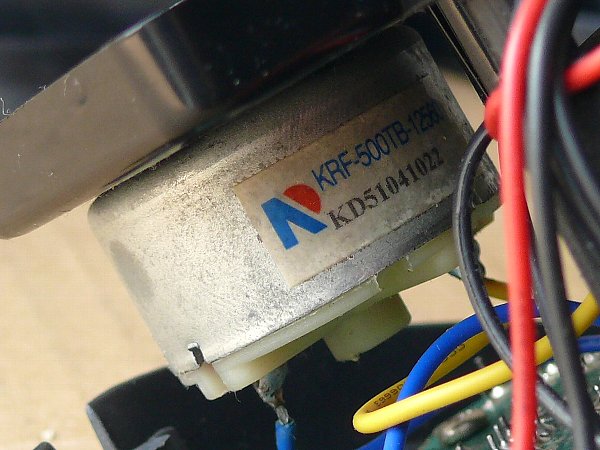
・2019.06.25. XENLON のモーター交換 ワインディングマシーンのモーターは マブチ RF500TB-12560 が定番
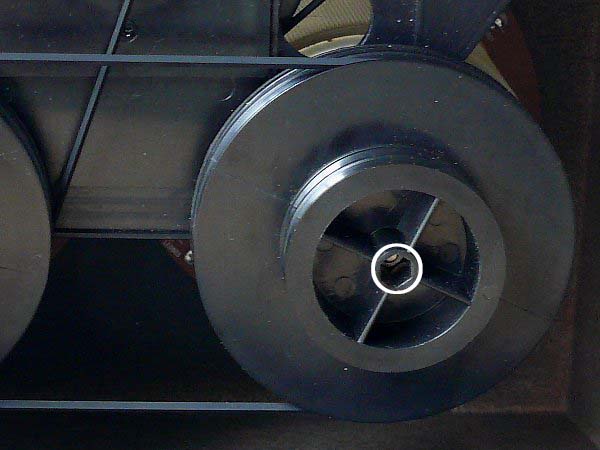
XENLON は大きなプーリーを動かすのでモーターに負担をかけます。
そのため、モーター故障は当たり前。
当方でも7台のXENLON がモーター故障となりました。
モーター故障で動かなくなった XENLON は 「 だだのゴミ 」、
Yahooオークションに出品しても送料が高いのでまったく入札されません。
なんとか、モーター交換ができないものでしょうか?
答えは「800円+30分でできます。」。モーターは「マブチ RF500TB-12560 」
LUHW、ESPRIMA 、EILUX、ArcaFutura、SPI、巻き太郎 などのモーターも同じです。
・XENLONについて再び
★XENLON には マブチ RF500TB-12560 が適合
★マブチ RF500TB-12560 はワインディングマシーンの定番
-モーター交換手順-
★角二連交換手順
★丸二連・角四連交換手順
1.XENLON に適合するモーター
a.XENLON について
|
|
| これが丸二連。 角ニ連の前のモデルです。 角二連よりシンプルです。 スイッチの種類が二つあります。 |
これが角二連。 LEDライトがプルーになり、三台を連結して一つのアダプターで運転できるようになりました。 ただし、丸二連よりホルダーの品質が悪くなったので、 ホルダーが割れて回転ドラムと擦れる不具合が生じるようになりました。 裏蓋を開けて白い粉が出ていればこの不具合です。 モーターは代替品があり交換できますが、ホルダーに代替品はありません。 |
 |
こちらが XENLON の代表機種、角四連。 一昔前には 「 ワインディングマシーンのステータス 」 と評価されたもので、 自動巻きコレクターの間では 「 いつかは XENLON の 四連 」 というほどのものでした。 丸二連、角二連、角四連 の部品は スイッチ基盤のコード長さ が 角二連 と 丸二連 で違うだけで。あとはすべて共通です。 モーターはすべて一個。 そのため、角四連の方が二連に比べてモーターの負担が大きいので、 「 角四連の方がモーター故障が多い 」 はずなのです。 しかし、、角四連の方がモーター故障が少ないのです。 結局、 「 XENLON は 角四連が標準 」 ということなのでしょう。 ある出品者さんが一度この四連を出品し、2万円程度の値段が付いたので、 わざわざオークションを取り消して 「 開始 5万円 」 で再出品していました。 これは欲張りすぎ。 角四連は新品でも中古でも 「 1万円を越えたら万々歳 」 でしょう。 そもそも 「 自分が使わなくなっていらなくなったもの 」 を出品するのですから…。 5万円あったらMTEの交流モーター四連の良品が二台も買えますよ。 |
| ワインディングマシーンにば ソフト巻き上げ型 と 強力巻き上げ型 があります。 ソフト巻き上げ型は 巻き上げ量が 「 1/3~1/2 」 になりますが、 強力巻き上げ型は 「 常にフル巻き上げ状態 」 になります。 時計にとって優しいのはソフト型です。 しかし、手巻き機能の付いていない時計にはソフト型は不便です。 なぜなら、時計を装着するときに「フル巻き上げ状態」にならないからです。 自動巻きはフル巻き上げで精度がでるように調整されています。 だから、手巻き機能のついていない自動巻きは精度が出ないのです。 XENLON は強力巻き上げ型です。 回転ドラムの回転数は 約19回転 / 分。 大きなプーリーを回すのでモーターに負担がかかります。 そのため、モーター故障がつきものです。 モーター故障をした XENLON ば 「 ただのゴミ 」。 メーカーからの部品供給はありません。 なんとかモーター交換ができないものでしょうか? |
 |
 |
| XENLON に使われているのは ミネベア の 6Vモーター。 シャフト径=1.8㎜Φ 時計ホルダー回転数が約19回転/分、プーリー減速比約が1/130。 アダプターは 12V ・ 1000mA→端子出力は7.15V モーター回転数は約 19×130=2470回転/分。 つまり、低回転 ・ 高トルクの 直流モーターが必要なのです。 |
この条件を満たすのは マブチRF500TB-12560。 シャフト径=2.0㎜Φ。シャフト長=8㎜(モーター本体上端面より 10㎜ ) ※ 6V / 2700回転 → こちら、 12V / 5500回転 → こちら ただし、メーカー相手の注文生産ですから一般人が入手することはできません。 中華コピーでよいなら 1000円程度で入手できます。 「RF500TB-12560」で検索して、上記の回転数のものを選んでください |
なお、プーリーを取り付けるので、シャフト長がモーター上端面から10㎜以上必要です。
シャフト長6㎜のもの(モーター上端面からは8㎜程度になる)はプーリーとの接合が2㎜くらい少なくなるのでプーリーを接着剤で留めるなどの処置が必要です。
シャフト先は取り付け部から出るので、シャフトが長い場合は切断する必要はありません。
・この条件に合うのは → 6V/2700回転、12V/2700回転,
・シャフト長6㎜ → uxcell-5V / 2700RPM,
uxcell-12V / 5500RPM。
・マブチは単品でも入手できますがとてつもなく高いです。 → マブチRF500TB-12560
 |
 |
| マブチのものはしっかりと刻印があります。 | 偶然、新品の30個セットを入手しました。 メチャクチャ安かったので驚き。 こまめにYahooオークションで検索するのをお勧め。 なお、今のところ 「 このモーターを譲る予定はありません 」 ので連絡してこないでください。 |
c.マブチ RF500TB-12560 はワインディングマシーンの定番
「他のワインディングマシーンにはどんなモーターが使われているのだろう?」
故障したり使わなくなったりしたワインディングマシーンを調べてみました。
結果は、「名の通ったワインディングマシーンにはこの マブチRF500TB-12560 が使われている」ということ。
なんと、このモーターが定番なのです。
※ Steinhausen は このモーターを使っていません。
Steinhausen のモーターを XENLON に取り付けたら 時計ホルダー回転数が 5回/45秒→約6.7回/分となりました。
XENLON の時計ホルダー回転数は二連で23回転/分、四連で19回転/分だから これを1/3くらいに下げて「ソフト巻き上げ」にするのならこのモーターが適合します。
 |
 |
| こちらが LUHW、ESPRIMA 、EILUX、ArcaFutura、SPI、巻き太郎 の 単巻き。 | マブチRF500TB-12560 です。 |
 |
 |
| こちらが、単2×2の電池式単巻きの ESPRIMA 、EILUX、ArcaFutura。 使われているのはマブチRF500TB-12560 |
左右に電池ホルダーがあるこのタイプも同じです。 |
 |
 |
| ただし、自社ブランドを表示している場合もあります。 | このモーターは 1.5V~12V で動きますから、単2×2本の 3.0V でも動くのです。 もちろん、電圧が低いので回転数は低くなります。 |
このモーターは低電圧 ・ 低回転で使われているので中古でも元気なはずです。
これらのワインディングマシーンは「ギヤシャフトの軸受けがプラスチック板に穴を開けただけのもの」なので、軸受け部分が磨耗してギヤ滑りを起こし回転ドラムが回転しなくなります。
このような「不動品」を格安で入手してそのモーターを使うという方法がありますが、格安なマブチの中華コピーを使った方が安上がりで簡単でしょう。
モーターの準備ができたら、モーター交換しましょう。
30分程度の作業です。
●●
 |
回転ドラムの四個のビスを外して、回転ドラムを外します。 |
 |
 |
| 回転ホルダーのビスを緩めてプーリーを外す。 | ホルダービスはプーリーを留めています。 ホルダービスを外せばプーリーが外れます。 ホルダービスをドライバーで外すのは面倒なので、 ホルダービスをドライバーで止めておいて、プーリーを回転させてホルダービスを外します。 |
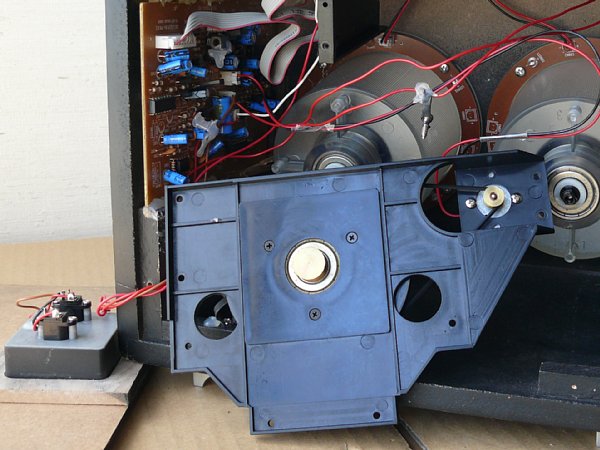
②.モーター取り付け板を外す
 |
 |
| 8個のビスを外します。 | モーター端子も外しましょう。 端子は一番上になります。 |
 |
この段階で回転ドラム、モーター取り付け板、ベルトが外れています。 回転ホルダーは LED ライトの基盤と一緒に取り付けられているので外れません。 |
③.プーリーを外して取り付ける
 |
 |
| プーリーは両側からマイナスドライバーを差し込み、 両方のドライバーを下に押し下げれば簡単に外れます。 外れにくいときはドライヤーなどでプーリーを温めて膨張させて外してください。 |
プーリーは 「 モーター面~プーリー上端= 10.5㎜ 」 に取り付け。 マブチなら 「 ツライチ 」 でOK。 |
一度外したプーリーは緩くなっています。
シャフトが 1.8㎜Φ のモーターに再度取り付けるにはネジロックが必要です。
マブチのシャフトは 2.0㎜Φ ですが、プーリーを上から叩けば取り付けられます。
モーターシャフトへの負担を懸念するなら、プーリーをドライヤーやホットガンなどで温めてから取り付ければよいでしょう。
④.モーターを取り付ける
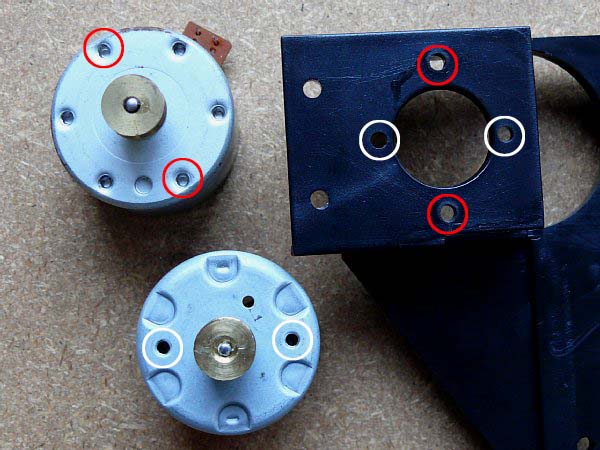 |
まずは新しいモーターにコードをハンダ付け。 赤or茶コードがプラス、黒or白コードがマイナス。 マブチモーターの端子の〇印がプラスです。 モーターコードが外しにくいときは古いモーターのコードを切断して新しいモーターにハンダ付け。 モーター取り付け位置は二つあります。 タテの二つの穴は取り付け穴中心間が 26㎜。 これは XENLON に使われているミネベアモーター取り付け穴です。 ヨコの二つの穴は取り付け穴中心間が 22㎜。 これは他のモーター取り付け穴です。 写真のモーターの上がミネベア、 下がマブチ。 マブチモーターはヨコの取り付け穴を使って取り付けます。 モーター取り付けの左右上下はモーターの作動に関係しません。 ただ、 XENLON の ミネベアモーター取り付けは 入力端子を上にし正面から見て 「 左がマイナス、 右がプラス 」 です。 |
⑤.試運転をする
新しいモーターを取り付けたら モーター取り付け板の内側にベルト ( 短いベルト ) を取り付ける。
そしてモーターの試運転。
モーター取り付け板を取り付ける前に 「 各モードでモーターがその方向に動くが 」 を確認するのです。
 |
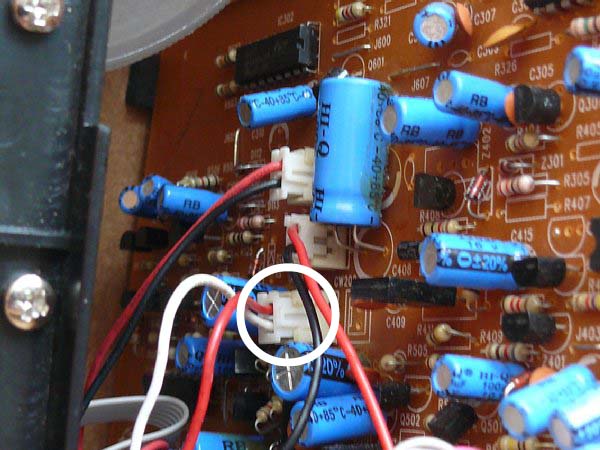
モーターが動かないモードがあれば、スイッチ基盤のタクトスイッチ交換が必要。→→→こちら XENLON に マブチ を取り付けて回転数を測ってみると、 ・角二連 : 時計ホルダー回転数が10回/26秒→10×60/26≒23回転/分、モーター回転数=23×130=3000rpm ・丸二連 : 時計ホルダー回転数が10回/25秒→10×60/25≒23回転/分、モーター回転数=24×130=3120rpm ・角四連 : 時計ホルダー回転数が10回/32秒→10×60/32≒18.75回転/分、モーター回転数=18.75×130 ≒2438rpm ※二連と四連で時計ホルダー回転数 / モーター回転数が異なるのは モーターにかかる負担が違うからでしょう。 マブチの公表値は 無負荷で 12V/5500rpm ・ 0.025A、6V/2700rpm ・ 0.020A。 XENLON の モーター端子の出力電圧は 7.15V。 モーター回転数と入力電圧は比例するから、7.15V/約3237rpm。 負荷がかかっているから上記の測定回転数は適正と言えるでしょう。 |
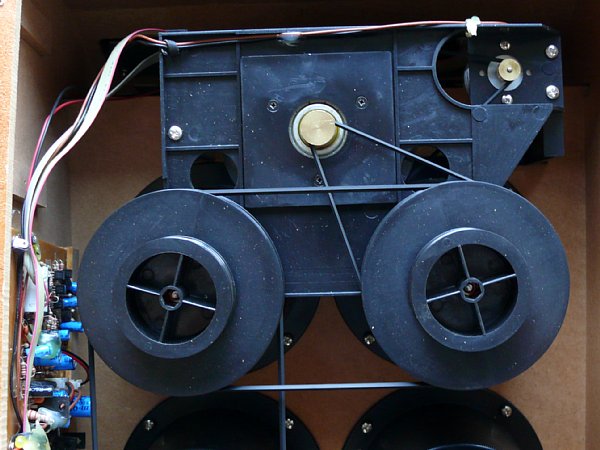
b.丸二連
角二連と上下左右が逆になっています。
丸二連をひっくり返すと角に連になります。
あとは角二連と同じです。
 |
 |
| ベルトは左右の小プーリーに太いベルトがかかっています。 左右の大プーリーの外側に角二連や角四連の細くて大きいベルトを使ってもOKです。 |
角二連とは上下左右が逆に配置されていますから、 モーター端子はタテに並んだ三つのうちの一番下になります。 ※ 角ニ連ではタテに並んだ三つのうちの一番上がモーター端子です。 |
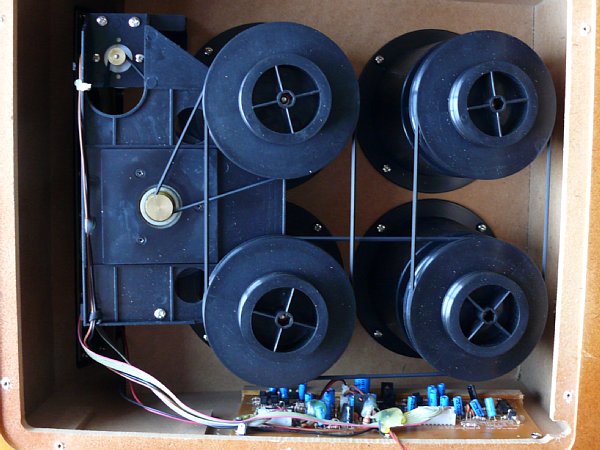
c.角四連
上に角二連のユニット、下に二つのホルダーが付いているだけです。
 |
 |
| ベルトは、 ・ モーター~プーリー/内側 ・ 上プーリー間/外側 ・ 上プーリー~下プーリー/内側 ・ 下プーリー間/外側 |
上のユニットだけ見れば角ニ連とまったく同じです。 |
但し、上下にスペースがあるので、奥行きを少なくするために、回路基盤は反時計回りに90度回転して取り付けてあります。
 |
モーター端子は三つ並んだ端子の一番外側になります。 |
つづく
前へ/ XENLON のタクトスイッチ交換 次へ/EILUX3連 / Arca Futura 2連モーター交換 目次へ SPnet番外TOP SPnet SPnet2